Authors’ note: Team names are different for Space U and the other Space School activities and ChallengeX, but members are the same:
- Anneke, Ananya, Jes, Aletia = Mariner 4/ Lunar-Tics/Green 2/Luminate
- Jemima, Tess, Alicia, Izzy, Zenita = Deep Space 1/Whetu Kaha/Gold 2/KarmanBeyond
- Emma, Chielin, Maddie, Elizabeth = LROC/Lunar Conversions/White 2/Caelum
Morrrrning!! Another 5:30 wake up today was met with just as many groans as ever, but we are getting used to it… It is so worth it though for all the awesome activities every day has in store for us at Space U!
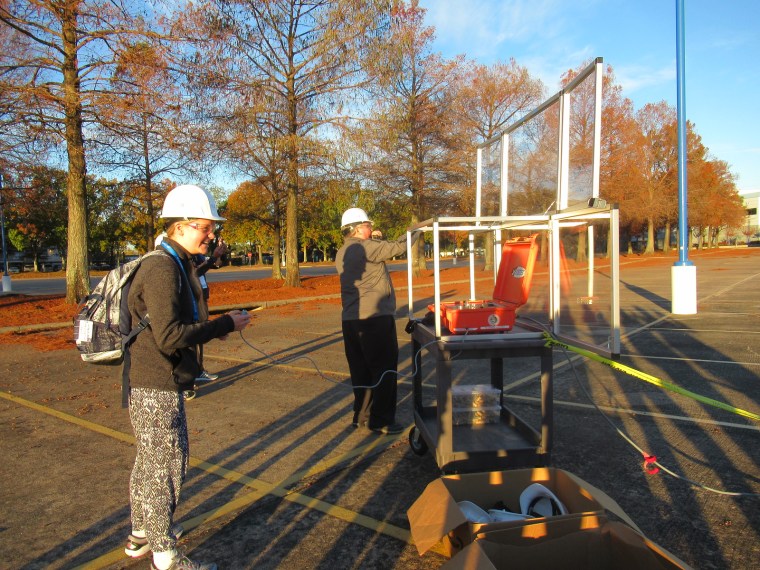
This morning was pretty freezing, so we all wrapped up and headed to our first destination- the outdoor carpark where we would launch our rockets- the moment of truth was finally here! All our creations had been lined up on a table, wired up and ready to be launched at the click of a button. We donned safety goggles and hard hats (a bit of a throwback to bridge building with the awful photos to prove it!!!) and one by one, counted down to blastoff! It was very exciting to see the results! Deep Space 1 and the rest of the small rockets had evidently made the best choice in order to get their rockets the highest- there was a collective ‘woooaaaahhh!!!’ as these ones took to the sky! Some parachutes deployed successfully for the bonus as well (though we all reckoned the classification of Deep Space’s parachute as only ‘partially deployed’ should have counted properly!!). Mariner 4 was delighted when our rocket’s second stage separated properly, as we had been sanding down the connector piece for around an hour during building as it was too tight and we were scared it wouldn’t come off! Mariner 4 failed on the parachute front with a nice nose dive into the tarmac- so perhaps a bit more training will be required before we get to building rockets to carry real astronauts…
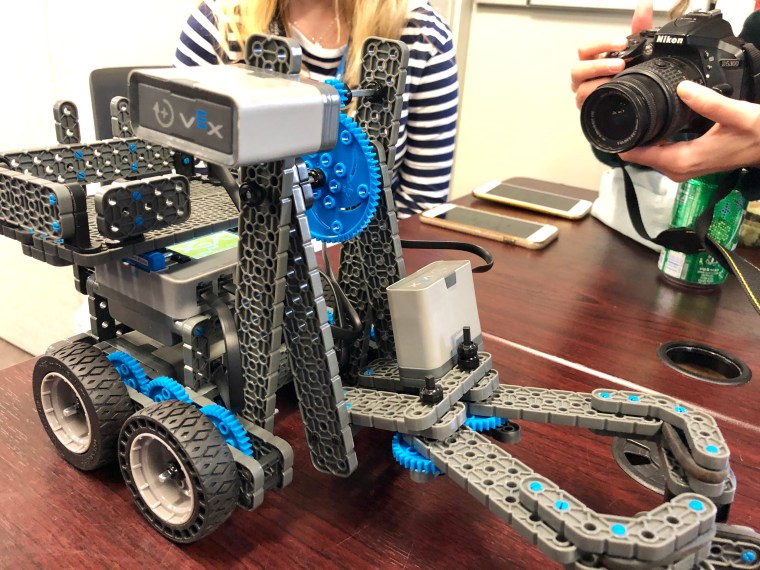
Next, we returned to our classroom for an introduction to today’s activities- robots!! Our first task was to use various available gears, motors, panels and other bits and pieces to construct an end effector off a basic robot console, creating a rover that could pick up rocks in our mock-up ‘mars’ surface when operated by our remote control. We learned about the different gearing patterns, such as that a small driving gear attached to the motor, with a larger driven gear, will cause a large torque but a smaller speed i.e. good for lifting, while a larger driving gear connected to the motor moving a smaller driven gear will have a larger speed but smaller torque. Once again, this was running off our same budget, so we had to plan and build carefully! Various groups had quite different designs, which was interesting to see.
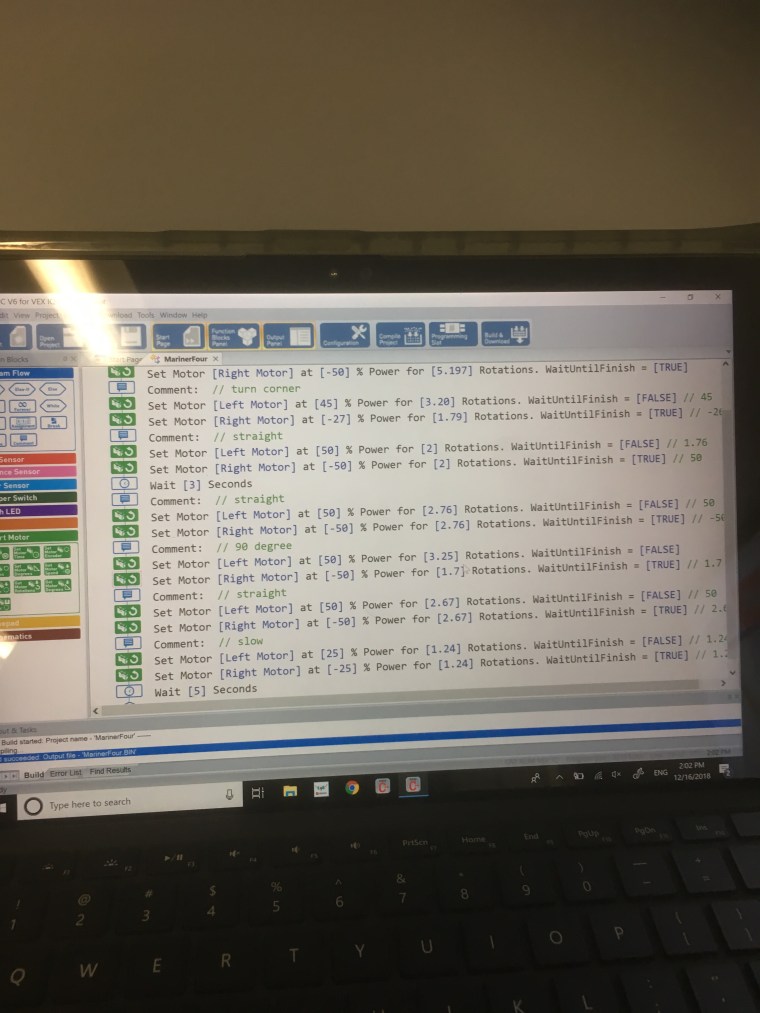
Part way through, each group decided on one or a few members to be their ‘coders’ to take part in the next challenge, while the rest continued to work on the main robot. Ananya, Arnie and Emma, along with the others, all left our creations in the good hands of the rest of the group, Jemima staying as she played a vital part in her design and build. Our challenge was to code a robot to follow a certain path and do various turns and speed changes. This involved measuring distances on the track, adjusting the two-wheel sides to do different things in circular turns and measuring the radius etc of the turns to make calculations with the wheel circumference to work out how many rotations needed to be made. Under the time pressure, everyone was working furiously away, and we all more or less finished in the end! Each obstacle or track element successfully passed gained points, while going off the track and touching the floor resulted in deductions. Mariner 4 was delighted to be placed 3rd and gave Flibbles a joyride around. It was so much fun to test, and everyone’s efforts, whether successful or not, were met with enthusiastic cheering from students and chaperones alike.
After the very exciting testing of the coded robots, we moved to the rover challenge. Here, one person was designated ‘driver’ and had to use the PlayStation-like controller to work the precoded steering, as well as the motors we had installed to operate an arm and a claw at the end to attempt to grab the rocks. This was a lot easier said than done- Deep Space 1’s incredibly well-engineered robot did not want to cooperate and under the pressure of time (and admittedly Jemima’s dodgy driving skills) didn’t quite manage to grab the rocks as designed! That machine was an epic creature. Most of the teams’ robots ended up falling apart due to unbalanced components or some dodgy driving through the sand and hills of our mockup ‘mars’ terrain. Mariner 4’s robot finally stopped displaying its ‘error’ messages on the console, and we took to the sand, only for the arm to fall off when we tried to grab the heaviest rock… But with some epic driving from Jes and lots of encouraging competitive yelling from the rest of the team, we managed to drag the rock out of the sand, cm by painstaking cm, by rotating the main console side to side and shuffling along the ground, to finally make it back to the ‘safe zone’. Coupled with bonus points from correctly identifying all of the rocks, using features such as their colour, texture and location, we earned a somewhat dodgy 1st place!
Random sidenote: around the classroom area are various life-sized boards with full-body images of various NASA astronauts printed on them. The instructors take great delight in moving these around, so when we open a door or come out of the bathroom, one is always there to (creepily) greet us when we are least expecting it!!
I don’t think we’ve mentioned our GMs (group managers) and supporting teachers yet either. Our teachers are Chris from Waikato Dio, and Philipp from Napier Girls’ High- two awesome science teachers who are always keen to help out and get competitive, getting involved in the challenges with their own designs as well. Our GMs are Shana (who is mainly for the other subgroup in our group, AGSA 23), a very caring and enthusiastic lady with a wicked sense of humour, and Gabi, our subgroup (AGSA 24)’s main leader: a 24-year-old Dio old girl who has just finished a double degree in Biomedical Science and Engineering at Monash and is going to work for HP in Barcelona. She is such a legend with never-ending energy which gets us through the days and always makes us laugh. Another fabulous person on this trip is Troy, our bus driver. He is always there in the mornings to greet us with energy, a big smile and high-fives all around and gets into our fun and singing as we drive.
After our robot adventures, we headed back to the hotel for a quick dinner before finally presenting our ChallengeX projects! Not sure if we’re described these before, but it was essentially a challenge to create and present a company to fulfil the future demand of space tourism, complete with seemingly endless scientific and business details and planning, which we were scrambling to finish at the last minute. It was exciting to finally see everyone’s presentations that had been pretty secretive for a while! Gold 2 presented their ‘Karman Beyond’ company for a calming mind, body and soul trip to the moon, with incredible research and technology thanks to Jemima’s crazily awesome dedication to her cause and many late nights (/early mornings…), as well as White 2’s Lunar Conversions with their waste processing system and rover for lunar bases, with amazing scientific rationale by Emma, and the Lunar-tics’ ‘LID’ dome device and habitat designed in a lunar crater with an environmental focus.
And finally we had an early night- the best present we could wish for after such an insanely busy schedule!!